TL;DR Snapshot· Accelerometer = measures linear acceleration (m/s²) · Gyroscope = measures angular velocity (°/s) · 6-axis IMU = tilt + rotation, no compass heading · 9-axis IMU = adds magnetometer for directional awareness · Noise density affects stability · Drift affects long-term rotational accuracy Understanding these trade-offs is more important than simply counting axes. |
Motion sensing rarely draws attention — until it fails.
A drone that won’t hold position. A fitness tracker that counts phantom steps. An industrial motor that “looks fine” right before it fails. Behind these moments sit gyroscopes and accelerometers sensors, quietly measuring motion thousands of times per second.
Most research into these sensors begins the same way: confusion around differences, uncertainty about 6-axis versus 9-axis systems, questions about drift, and frustration with unclear datasheets. This guide addresses those concerns directly — not with marketing language, but with grounded explanations and practical selection logic.
What Is Gyroscopes and Accelerometers Sensors?
Gyroscopes and accelerometers sensors are motion-detection components used to measure movement, orientation, vibration, and rotation.
An accelerometer measures linear acceleration — how quickly velocity changes in space.
A gyroscope measures angular velocity — how fast something rotates.
When combined, they form an inertial measurement unit (IMU). These sensors are typically MEMS-based (microelectromechanical systems), meaning tiny mechanical structures are etched into silicon.
They are found in:
- Smartphones
- Drones
- Automotive safety systems
- Robotics platforms
- Wearables
- Industrial vibration monitors
They do not measure “position” directly. Instead, they measure changes — acceleration and rotation — which software interprets into orientation or movement tracking.
How Gyroscopes and Accelerometers Sensors Works
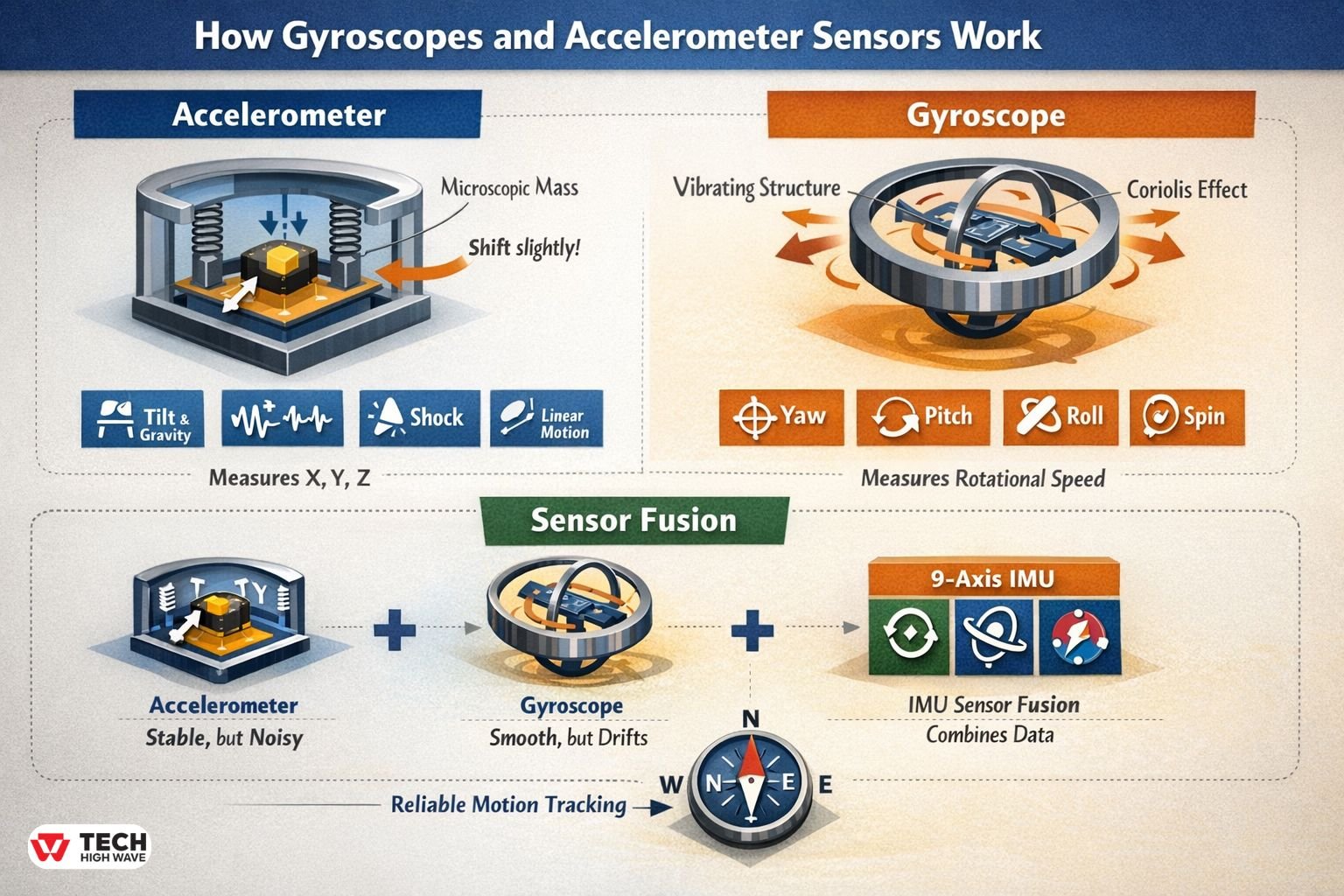
Although often packaged together, their internal physics are different.
Accelerometer Working Principle
Inside a MEMS accelerometer is a microscopic mass suspended by flexible beams.
When acceleration occurs, the mass shifts slightly. That movement changes electrical capacitance. The circuitry converts this into acceleration data.
Accelerometers measure:
- Gravity (tilt detection)
- Vibration
- Shock
- Linear motion
A 3-axis accelerometer measures X, Y, and Z directions.
In simple terms: it determines which direction is “down.”
Gyroscope Working Principle
MEMS gyroscopes rely on the Coriolis effect.
A small internal structure vibrates constantly. When the device rotates, the Coriolis force alters that vibration. The system translates this shift into angular velocity data.
Gyroscopes measure:
- Yaw
- Pitch
- Roll
- Spin
Unlike accelerometers, gyroscopes measure rotational speed. Orientation must be calculated by integrating that speed over time.
This integration process introduces drift.
Sensor Fusion: Why Both Are Needed
Accelerometers are stable long-term but noisy during movement.
Gyroscopes are smooth in the short term but drift over time.
Sensor fusion blends both signals to stabilize motion tracking. Many systems also add a magnetometer, creating a 9-axis IMU capable of compass heading.
Without fusion, orientation becomes unreliable quickly.
Accelerometer vs Gyroscope: Clear Differences
| Feature | Accelerometer | Gyroscope |
| Measures | Linear acceleration (m/s²) | Angular velocity (°/s) |
| Best Detects | Tilt, gravity, vibration | Rotation and spin |
| Main Limitation | Noise during motion | Drift accumulation |
| Common Uses | Step tracking, orientation | Drone stability, VR tracking |
A helpful mental model:
- Accelerometer = direction of gravity
- Gyroscope = speed of rotation
Both are required for stable spatial awareness.
6-Axis vs 9-Axis IMU: What Actually Changes
A 6-axis IMU combines:
- 3-axis accelerometer
- 3-axis gyroscope
The widely used MPU6050 is an example.
A 9-axis IMU adds:
- 3-axis magnetometer
This addition enables compass heading.
Important nuance: magnetometers are sensitive to nearby metal and electrical interference. In real deployments, heading accuracy often depends more on calibration quality than axis count.
A 6-axis sensor knows tilt.
A 9-axis system knows direction.
Degrees of Freedom (DOF) Explained
Degrees of freedom represent independent movement axes.
- 3 DOF: linear motion
- 6 DOF: linear + rotational motion
- 9 DOF: linear + rotational + magnetic heading
More DOF increases capability but also increases calibration complexity.
Key Features to Look for in Gyroscopes and Accelerometers Sensors
Chart & Visualization Tools
Real-time visualization tools reveal drift, bias, and instability immediately. Development boards with plotting support reduce debugging time significantly.
A sensor without usable software support often costs more in engineering hours than in hardware price.
Record & Document Storage
For industrial and research use, logging capability matters.
Consider:
- Stable sampling rate
- Buffer size
- Bandwidth alignment
- Data export reliability
In vibration monitoring, inconsistent sampling invalidates analysis.
Collaboration & Documentation
Strong documentation includes:
- Bias stability data
- Temperature drift curves
- Noise density charts
- Interface timing diagrams
Sparse datasheets slow development.
Privacy & Data Security
In connected devices, motion data may indicate behavioral patterns. Secure firmware updates and encrypted data transmission are increasingly standard requirements.
Pro Tip: Noise Density Matters More Than Marketing
Noise density is expressed as:
μg/Hz\mu g/\sqrt{Hz}μg/Hz
It indicates random signal noise per bandwidth.
Lower is better.
In high-vibration industrial environments, serious applications aim for below 100 µg/√Hz.
High noise leads to:
- False fault detection
- Excessive filtering
- Reduced measurement resolution
In predictive maintenance projects, noise often limits performance before drift does.
Calibration and Drift: Where Many Projects Fail
All gyroscopes drift. This is not a defect; it is a physical limitation.
Bias instability accumulates over time. Temperature changes amplify this.
Effective systems include:
- Factory calibration
- Temperature compensation
- Static bias correction
- Periodic recalibration routines
Magnetometers require environmental calibration. Steel enclosures distort heading. Nearby motors create magnetic noise.
In field deployments, improper calibration causes more failures than poor hardware quality.
Real-World Use Cases

Smartphones
Devices such as the iPhone and the Samsung Galaxy series rely on accelerometers and gyroscopes for:
- Screen rotation
- Gesture control
- Step tracking
- Camera stabilization
- Augmented reality alignment
Drone Flight Controllers
Gyroscopes provide rapid rotation feedback. Accelerometers correct long-term drift. Without fusion, hovering becomes unstable within seconds.
Industrial Vibration Monitoring
Accelerometers detect bearing wear and imbalance. Proper mounting — firmly attached, not loosely adhered — dramatically improves reliability.
Noise density directly impacts fault detection accuracy.
Automotive Safety Systems
Motion sensors support:
- Stability control
- Rollover detection
- Airbag deployment triggers
Automotive-grade components emphasize temperature tolerance and reliability under extreme conditions.
Accelerometer and Gyroscope Sensor Price (2026 Overview)
Typical pricing tiers:
- Hobby modules: $2–$10
- Mid-range 6/9-axis IMUs: $20–$80
- Industrial-grade IMUs: $200–$1,000+
- Automotive-certified systems: premium pricing
Total cost includes calibration effort, integration time, and compliance requirements.
How to Choose the Right Gyroscopes and Accelerometers Sensors
-
Clarify the Application
- Simple orientation? → 3-axis accelerometer
- Drone or robotics stabilization? → 6-axis minimum
- Navigation or heading reference? → 9-axis IMU
-
Check Performance Metrics
Evaluate:
- Measurement range
- Noise density
- Bias drift
- Bandwidth
- Temperature stability
Oversized range reduces resolution. Match range to real-world motion levels.
-
Assess Environmental Conditions
- High vibration?
- Extreme temperatures?
- Metal enclosures?
Environmental context often determines calibration complexity.
-
Confirm Interface Compatibility
Common communication protocols:
- I2C
- SPI
Ensure compatibility with the selected microcontroller.
-
Balance Precision and Budget
Higher precision increases cost and integration demands. Over-specification rarely improves end-user experience.
Also Check: Visual Micro Rescan Solution: Complete Guide for Arduino in Visual Studio 2026
Troubleshooting Quick Reference
| Issue | Likely Cause | Practical Fix |
| Orientation drifting | Gyroscope bias | Apply sensor fusion, recalibrate |
| Compass unstable | Magnetic distortion | Perform hard/soft iron calibration |
| Vibration readings inconsistent | High noise density | Select lower-noise accelerometer |
| Data jitter | Sampling mismatch | Align bandwidth and sampling rate |
Common Mistakes to Avoid
- Assuming 6-axis systems provide compass heading
- Ignoring temperature compensation
- Mounting sensors loosely in vibration applications
- Selecting the maximum measurement range “just in case.”
- Skipping calibration validation
Precision depends on integration discipline as much as hardware quality.
Future Trends in Gyroscopes and Accelerometers Sensors (2026 Outlook)
Motion sensing development now focuses on refinement rather than expansion.
Current trends include:
- Improved bias stability
- Integrated motion processing units
- Lower power consumption
- Enhanced automotive compliance
- Better drift-reduction algorithms
The industry is optimizing accuracy and efficiency rather than simply increasing axis count.
Frequently Asked Questions
Q1: What is the difference between an accelerometer and a gyroscope?
An accelerometer measures linear acceleration and tilt, while a gyroscope measures angular velocity and rotation.
Q2: Is a 6-axis IMU enough for navigation?
No. A 6-axis IMU lacks a magnetometer and cannot determine magnetic North. Navigation systems typically require 9-axis sensing.
Q3: Why do gyroscopes drift?
Gyroscopes drift due to bias instability and temperature variation. Sensor fusion and recalibration reduce accumulated error.
Q4: What affects accelerometer accuracy most?
Noise density, mounting stability, temperature variation, and calibration quality strongly influence performance.
Q5: Are expensive sensors always better?
Not necessarily. Higher-cost sensors provide improved stability and precision, but many consumer applications do not require industrial-grade performance.
Final Take
Gyroscopes and accelerometers enable modern motion intelligence. Selection should prioritize application needs, environmental context, calibration capability, and realistic performance requirements rather than axis count alone.
Also Read: Is Tech Tales Pro Reed Worth It in 2026?